椭圆检测与拟合
实验目标
- 调⽤CvBox2D cvFitEllipse2( const CvArr* points )实现椭圆拟合
实验环境
- Windows 10 1709
- OpenCV 3.3
实验过程
实现了一个fitEllipse()函数,函数原型如下:
1 | void fitEllipse(char* filename, int threshold); |
传入图片路径,然后显示出图片椭圆拟合之后的效果。
支持命令行解析图片路径参数。
1 | FitEllipse.exe test.png |
如果没有路径参数,默认时当前目录下的test.png。
首先把图片读进来,包括一份灰度图和一份原图。
1 | Mat gray_img = imread(filename, IMREAD_GRAYSCALE); |
把灰度图二值化:
1 | Mat binary_img = gray_img >= thresh; |
然后使用findContours()检测二值化图像的轮廓点。
1 | findContours(binary_img, contours, RETR_LIST, CHAIN_APPROX_NONE); |
其中,参数3可以取值为:
- RETR_EXTERNEL: 只检测最外围轮廓,包含在外围轮廓内的内围轮廓被忽略
- RETR_LIST: 检测所有的轮廓,包括内围、外围轮廓,但是检测到的轮廓不建立等级关系,彼此之间独立,没有等级关系,这就意味着这个检索模式下不存在父轮廓或内嵌轮廓
- RETR_CCOMP: 检测所有的轮廓,但所有轮廓只建立两个等级关系,外围为顶层,若外围内的内围轮廓还包含了其他的轮廓信息,则内围内的所有轮廓均归属于顶层
- RETR_TREE: 检测所有轮廓,所有轮廓建立一个等级树结构。外层轮廓包含内层轮廓,内层轮廓还可以继续包含内嵌轮廓。
这里我们只选择RETR_LIST即可满足椭圆拟合的要求。
参数4可以取值为:
- CHAIN_APPROX_NONE 保存物体边界上所有连续的轮廓点到contours向量内
- CHAIN_APPROX_SIMPLE 仅保存轮廓的拐点信息,把所有轮廓拐点处的点保存入contours向量内,拐点与拐点之间直线段上的信息点不予保留
- CHAIN_APPROX_TC89_L1, CHAIN_APPROX_TC89_KCOS: 使用teh-Chin Chain 近似算法
这里直接选择简单的CHAIN_APPROX_NONE。
然后对于检测出的轮廓点,用椭圆去拟合:
1 | for each (auto contour in contours) |
椭圆的拟合至少需要6个点,所以把少于6个点的检测结果直接丢弃,然后对于剩下的点用cv2::fitEllipse()来拟合,然后把椭圆绘制在原图上。
之后再保存结果就行了。
实验结果
原图:

结果:
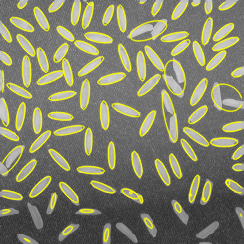
可以看到椭圆基本上都检测并拟合出来了。
心得体会
这次实验就是先检测出图像的轮廓点,然后用fitEllipse()函数来拟合椭圆,整体不是太难。然后注意到一点就是imread()读入图片的时候第二个参数可以选择读入的模式,可以用IMREAD_GRAYSCALE让其读入单通道的图片矩阵数据。
附:源代码
1 | // main.cpp |
本文标题:椭圆检测与拟合
文章作者:Han Yang
发布时间:2018-01-07
最后更新:2022-09-06
版权声明:本博客所有文章除特别声明外,均采用 CC BY-NC-SA 3.0 CN 许可协议。转载请注明出处!
分享