Notes about GCN Sampling
I read several papers about Sampling Algorithm in Graph Convolution Network training last week. So I wrote this note to simply record them.
| METHOD | SAMPLING SCHEME | CONFERENCE |
|---|---|---|
| GraphSAGE | node-wise | NIPS 17 |
| FastGCN | layer-wise | ICLR 18 |
| StochasticGCN | node-wise | ICML 18 |
| AdaptiveSampling | layer-wise | NIPS 18 |
| ClusterGCN | ?node-wise | KDD 19 |
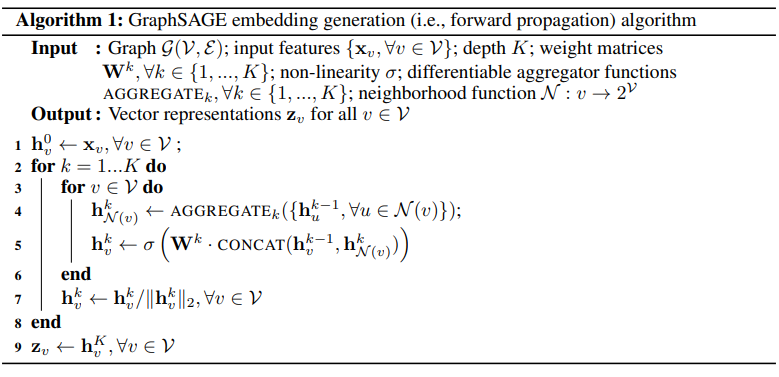
GraphSAGE
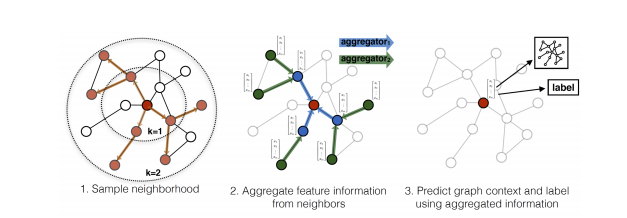
This sampling method is uniform sampling and very easy to understand. It uses a Top-down approach, which means that when it is calculating a node’s output, the algorithm finds the node’s neighbors layer by layer, until the node’s representation vector can be calculated.
In my opinion, this paper was not made for Sampling. It just use a simple and naive uniform sampling trick to avoid too heavy calculation. The main purpose of this paper might just be to make the train of GCN can be processed in a batch manner.
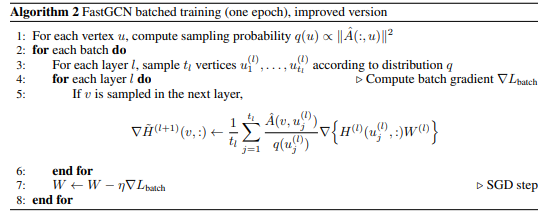
FastGCN
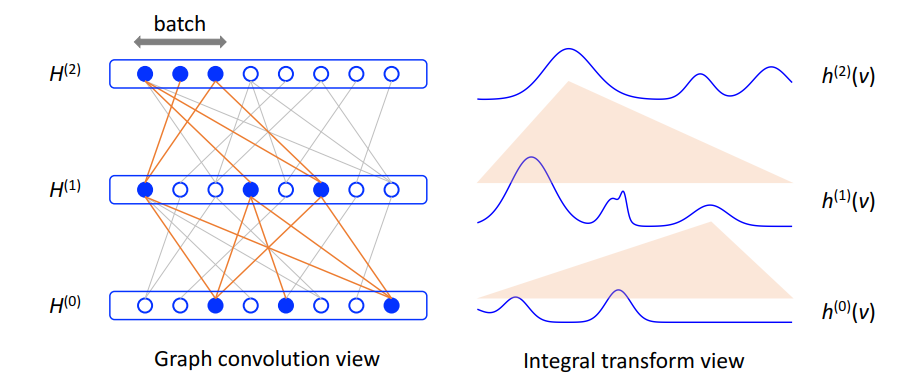
This paper rewrites the Message Passing formula in am integral form, then uses Monte Carlo Sampling to approximate the integral value.
$$
\tilde{h}{t+1}(v)=\int \hat{A}(v, u) h^{(l)}(u) W^{(l)} d P(u), h^{(l+1)}(v)=\sigma\left(\tilde{h}^{(l+1)}(v)\right), \quad l=0, \ldots, M-1 $$
$$
L=\mathrm{E}{v \sim P}\left[g\left(h^{(M)}(v)\right)\right]=\int g\left(h^{(M)}(v)\right) d P(v) $$
$$
\tilde{h}{t{l+1}}^{(l+1)}(v) :=\frac{1}{t_{l}} \sum_{j=1}^{t_{l}} \hat{A}\left(v, u_{j}^{(l)}\right) h_{t_{l}}^{(l)}\left(u_{j}^{(l)}\right) W^{(l)}, h_{t_{l+1}}^{(l+1)}(v) :=\sigma\left(\tilde{h}{t{l+1}}^{(l+1)}(v)\right), \quad l=0, \ldots, M-1
$$
It uses a factor proportional to the degree of the node as the importance sampling factor.
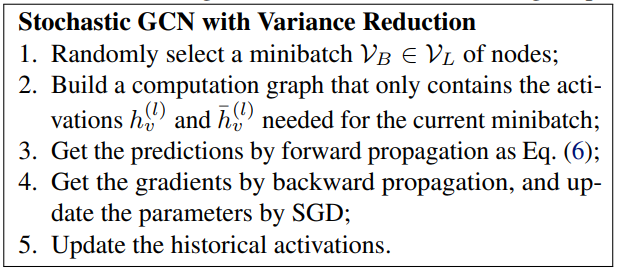
StochasticGCN
The algorithm is not complicated in this paper, but this paper provides many theoretical results and proofs.
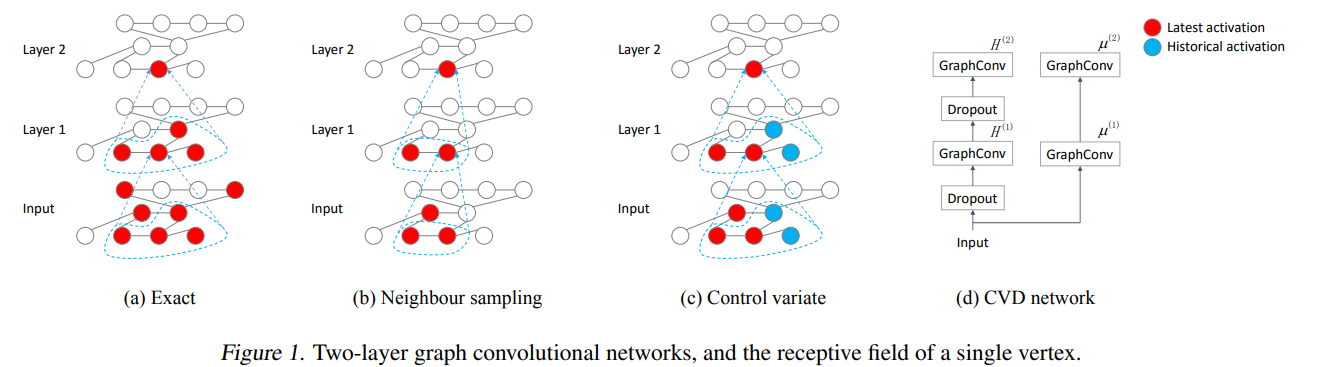
The algorithm is that when aggregating neighbors’ features/activations, only a few of neighbors will actually computes their activations, while the others will use the historical activations as approximation.
It can be easily derived that in the end when the message passing reaches a stationary point, the sampling variance will be eliminated to zero.
Along with the insight, the paper also provides the convergence guarantee and variance analysis. It has high theoretical value.
Adaptive Sampling
This paper follows the layer-wise style as FastGCN. It rewrites the message passing formula as
$$
\begin{array}{c}{h^{(l+1)}\left(v_{i}\right)=\sigma_{W^{(l)}}\left(N\left(v_{i}\right) \mathbb{E}{q\left(u{j} | v_{1}, \cdots, v_{n}\right)}\left[\frac{p\left(u_{j} | v_{i}\right)}{q\left(u_{j} | v_{1}, \cdots, v_{n}\right)} h^{(l)}\left(u_{j}\right)\right]\right)} \ {h^{(l+1)}\left(v_{i}\right)=\sigma_{W^{(l)}}\left(N\left(v_{i}\right) \hat{\mu}{q}\left(v{i}\right)\right)} \ {\hat{\mu}{q}\left(v{i}\right)=\frac{1}{n} \sum_{j=1}^{n} \frac{p\left(\hat{u}{j} | v{1}, \cdots, v_{n}\right)}{q\left(\hat{u}{j} | v{1}, \cdots, v_{n}\right)} h^{(l)}\left(\hat{u}{j}\right), \quad \hat{u}{j} \sim q\left(\hat{u}{j} | v{1}, \cdots, v_{n}\right)}\end{array}
$$.
So the important thing is to model the $q\left(u_{j} | v_{1}, \cdots, v_{n}\right)$.
In order to minimize the sampling variance, the optimal $q(u_j)$ can be modeled as
$$
\qquad \operatorname{Var}{q}\left(\hat{\mu}{q}\left(v_{i}\right)\right)=\frac{1}{n} \mathbb{E}{q\left(u{j}\right)}\left[\frac{\left(p\left(u_{j} | v_{i}\right)\left|h^{(l)}\left(u_{j}\right)\right|-\mu_{q}\left(v_{i}\right) q\left(u_{j}\right)\right)^{2}}{q^{2}\left(u_{j}\right)}\right] \ \qquad q^{*}\left(u_{j}\right)=\frac{p\left(u_{j} | v_{i}\right)\left|h^{(l)}\left(u_{j}\right)\right|}{\sum_{j=1}^{N} p\left(u_{j} | v_{i}\right)\left|h^{(l)}\left(u_{j}\right)\right|}
$$
But the $q(u_j)$ can’t be calculated before the layer was constructed. So the paper proposes to approximate it as
$$
q^{*}\left(u_{j}\right)=\frac{p\left(u_{j} | v_{i}\right)\left|g\left(x\left(u_{j}\right)\right)\right|}{\sum_{j=1}^{N} p\left(u_{j} | v_{i}\right)\left|g\left(x\left(u_{j}\right)\right)\right|}
$$
.
So the $q(u_i)$ can be calculated as
$$
q^{*}\left(u_{j}\right)=\frac{\sum_{i=1}^{n} p\left(u_{j} | v_{i}\right)\left|g\left(x\left(u_{j}\right)\right)\right|}{\sum_{j=1}^{N} \sum_{i=1}^{n} p\left(u_{j} | v_{i}\right)\left|g\left(x\left(v_{j}\right)\right)\right|}
$$
.
This paper doesn’t provide as many theoretical proofs as Stochastic GCN.
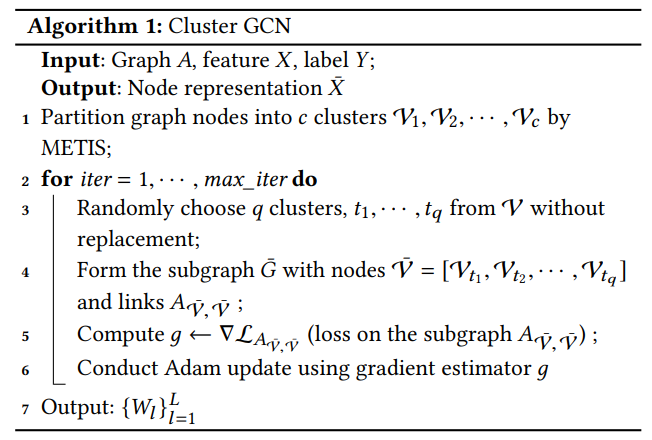
Cluster GCN
This paper doesn’t contain any theoretical proof, but reports better results than all previous work, which means it’s algorithm is intuitive but empirically efficient.
The algorithm is easy to follow according to the pseudocode below. No need for explanation.
本文标题:Notes about GCN Sampling
文章作者:Han Yang
发布时间:2019-09-08
最后更新:2022-09-06
原始链接:https://archived.yanghan.life/2019/09/08/Notes-about-GCN-Sampling/
版权声明:本博客所有文章除特别声明外,均采用 CC BY-NC-SA 3.0 CN 许可协议。转载请注明出处!
分享